
机器人三维拖链
2016/3/27 10:03:18点击:
本发明公开了一种机器人三维拖链,由多节单链节连接而成,单链节整体呈圆环形,由过其中垂线的平面分为左链节和右链节,左链节和右链节的两端在分隔处相互搭接;单链节中心设有一组相互卡接的卡槽和卡扣,卡槽中部设有一左球面连接口,卡扣下部,卜部设有一右连接球,右连接球能与其下方单链节中的左球面连接口球面连接;所述右链节包括内弧面和外弧面,其中右链节上部的外弧面为中间薄两边厚的渐变结构。本发明克服了现有机器人拖链因个链节结构中的外圈面设计均匀不易弯曲,导致在拖链中安装线缆和检修拖链内部线缆时不够便携的问题;密封性不好导致空气中的灰尘及机器人作业时产生的油污、水渍等进入到拖链内部,污染线缆的问题。
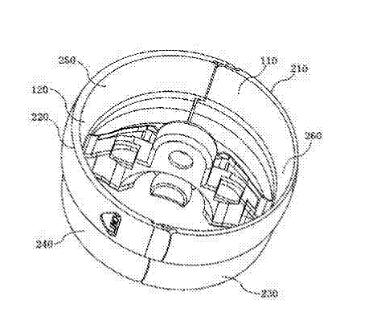
1.一种机器人兰维拖链,其特征在于:由多节单链节连接而成,所述单链节整体旱圆环形,由过共中垂线的平而分为左链节和右链节,所述左链节和右链节的两端在分隔处相互搭接;
单链节中心设有一组相互卡接的卡僧和卡扣,所述卜槽和卡扣的一端分别固定在左链节内壁中部和右链节内壁中部.卡槽中部设有一左球面连接口,卡扣卜部中部设有一右连接球,所述右连接球能与其下方单链节中的左球面连接口球面连接;
所述右链节包括内弧面和外弧面,其中右链节卜部的外弧面为中间薄两边厚的渐变结构;
单链节的下部尺寸小于上部尺寸,且多个单链节连接时,上方单链节能一部分位于下方单链节内,与下方单链节保持过盈配合。
2.根据权利要求1所述的机器人三维拖链,其特征在于:所述左链节分为左上部和左卜部,右链节分为右上部和右卜部.其中右上部的外弧面为巾间薄两边厚的渐变结构,左上部和右卜部搭接.左下部和右下部搭接,当多节单链节连接时,卜一节的单链节的左下部和右下部的一部分位于下一节单链节的左卜部和右卜部内,且过盈配合。
3.根据权利要求1所述的机器人叹维拖链,其特征在于:所述左链节和右链节的搭接后,搭接处的厚度与单链节周围厚度一致。
4.根据权利要求1所述的机器人三维拖链,其特征在于:所述单链节上端面包括内圈面和夕、圈面,所述左球面连接口与对应单链节的内圈面同心。
- 上一篇:钢铝拖链生产企业排名 2016/4/5
- 下一篇:怎样做能改善钢铝拖链的性能 2016/3/24